By Jimmy Apablaza
This problem is described in Page 321-322, Section 7.6 of the A first Course in Differential Equations textbook, 8ED (ISBN 0-534-41878-3).
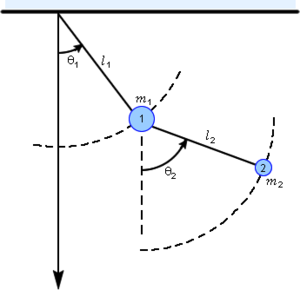
Figure 1. Coupled Pendulum.
Problem Statement
Consider the double-pendulum system consisting of a pendulum attached to another pendulum shown in Figure 1.
Assumptions:
- the system oscillates vertically under the influence of gravity.
- the mass of both rod are negligible
- no damping forces act on the system
- positive direction to the right.
The system of differential equations describing the motion is nonlinear


In order to linearize these equations, we assume that the displacements  and
and  are small enough so that
are small enough so that  and
and  . Thus,
. Thus,


Solution
Since our concern is about the motion functions, we will assign the masses  and
and  , the rod lenghts
, the rod lenghts  and , and gravitational force
and , and gravitational force  constants to different variables as follows,
constants to different variables as follows,

Hence,


Solving for  and
and  we obtain,
we obtain,


Therefore,


State Space

Let's plug some numbers. It's known that  . In addition, we assume that
. In addition, we assume that  ,
,  , and
, and  , so the constants defined previously become,
, so the constants defined previously become,

Hence, the state space matrix is,

Eigenvalues & Eigenvectors
The eigenvalues and eigenvectors are easily obtained with the help of a TI-89 calculator. First, we consider the  's identity matrix,
's identity matrix,
![{\displaystyle [\lambda I-A]={\begin{bmatrix}\lambda &1&0&0\\-{\dfrac {8}{3}}&\lambda &{\dfrac {2}{3}}&0\\0&0&\lambda &1\\{\dfrac {8}{3}}&0&-{\dfrac {8}{3}}&\lambda \\\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e5690dbcedd350d2117d03353097c9442e8eef25)
Once we define the matrix, the eigenvalues are determined by using the eigVi() function,




On the other hand, we use the eigVc() function to find the eigenvectors,

Standard Equation
Now, we plug the eigenvalues and eigenvectors to produce the standar equation,


Matrix Exponential
The matrix exponential is,

where
 ,
,
and
![{\displaystyle T^{-1}=[k_{1}|k_{2}|k_{3}|k_{4}]={\begin{bmatrix}-0.2\mathbf {i} &0.2\mathbf {i} &-0.29277\mathbf {i} &0.29277\mathbf {i} \\0.4&0.4&0.33806&0.33806\\0.4\mathbf {i} &-0.4\mathbf {i} &0.58554\mathbf {i} &0.58554\mathbf {i} \\-0.8&-0.8&-0.67621&0.67621\\\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/acbff5d73885646363eea5df6121cc2b714620a7) ,
,
so
![{\displaystyle T=(T^{-1})^{-1}=[k_{1}|k_{2}|k_{3}|k_{4}]^{-1}={\begin{bmatrix}1.25\mathbf {i} &0.625&-0.625\mathbf {i} &-0.3125\\-1.25\mathbf {i} &0.625&0.625\mathbf {i} &-0.3125\\0.853913\mathbf {i} &0.73951&0.426956\mathbf {i} &0.369755\\-0.853913\mathbf {i} &0.73951&-0.426956\mathbf {i} &0.369755\\\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7897431ee4e4b4230b005a457e5a817abddab2ed)
Again, we can resort to the TI-89 calculator. As it is mentioned above, the matrix exponential is obtained by typing eigVc(a)^-1*a*eigVc(a), where a is the matrix. Thus,

So, the exponential matrix becomes,

where

Hence,

so, the matrix exponential can be solved using matrix multiplication.
