Coupled Oscillator: Coupled Mass-Spring System with Input: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
No edit summary |
||
| (3 intermediate revisions by the same user not shown) | |||
| Line 18: | Line 18: | ||
<math>k_2 = 80000 \frac{N}{m}</math> |
<math>k_2 = 80000 \frac{N}{m}</math> |
||
Let the initial conditions be zero for the time being. |
|||
==Force Equations== |
==Force Equations== |
||
[[Image:BP_FBD2-2.jpg|right|FBD for |
[[Image:BP_FBD2-2.jpg|right|FBD for m1]] |
||
[[Image:BP_FBD1-2.jpg|right|FBD for m1]] |
[[Image:BP_FBD1-2.jpg|right|FBD for m1]] |
||
| Line 43: | Line 40: | ||
Since |
Since |
||
<math> |
<math> |
||
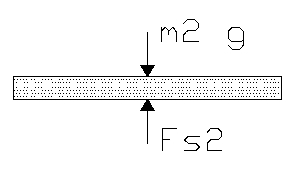
F_{s_2} = k_2(L_2+x_1-x_2) |
|||
F_s = -k \, x |
|||
</math> |
</math> |
||
<math> |
<math> |
||
\Rightarrow\ \ddot{x}_2=\frac{ |
\Rightarrow\ \ddot{x}_2=-g + \frac{k_2}{m_2} \, L_2 + \frac{k_2}{m_2} \, x_1 - \frac{k_2}{m_2} \, x_2 |
||
</math> |
</math> |
||
| Line 58: | Line 55: | ||
<math> |
<math> |
||
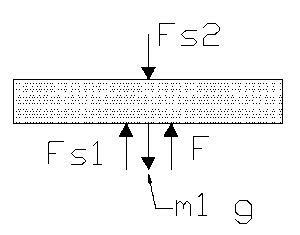
\Rightarrow\ m_1 \ddot{x}_1=F_{s_1} + F - m_1 g - F_{s_2} |
\Rightarrow\ m_1 \ddot{x}_1=F_{s_1} + F - m_1 g - F_{s_2} |
||
</math> |
|||
Since |
|||
<math> |
|||
F_{s_1} = k_1(L_1-x_1) |
|||
</math> |
</math> |
||
| Line 64: | Line 66: | ||
<math> |
<math> |
||
\Rightarrow\ \ddot{x}_1 = \frac{ |
\Rightarrow\ \ddot{x}_1 = - g +\frac{1}{m_1} \, F + \frac{k_1}{m_1} \, L_1 - \frac{k_1}{m_1} \, x_1 |
||
-\frac{k_2}{m_1} \, L_2 - \frac{k_2}{m_1} \, x_1 + \frac{k_2}{m_1} \, x_2 |
|||
</math> |
</math> |
||
| Line 94: | Line 97: | ||
\begin{bmatrix} |
\begin{bmatrix} |
||
0 & 1 & 0 & 0 \\ |
0 & 1 & 0 & 0 \\ |
||
\frac{-k_1}{m_1} & 0 & \frac{k_2}{m_1} & 0 \\ |
\frac{-k_1}{m_1}-\frac{k_2}{m_1} & 0 & \frac{k_2}{m_1} & 0 \\ |
||
0 & 0 & 0 & 1 \\ |
0 & 0 & 0 & 1 \\ |
||
\frac{k_2}{m_2} & 0 & \frac{-k_2}{m_2} & 0 |
|||
\end{bmatrix} |
\end{bmatrix} |
||
| Line 110: | Line 113: | ||
\begin{bmatrix} |
\begin{bmatrix} |
||
0 & 0 & 0 & 0 \\ |
0 & 0 & 0 & 0 \\ |
||
-1 & \frac{ |
-1 & \frac{k_1}{m_1} & \frac{-k_2}{m_1} & \frac{1}{m_1} \\ |
||
0 & 0 & 0 & 0 \\ |
0 & 0 & 0 & 0 \\ |
||
-1 & 0 & |
-1 & 0 & \frac{k_2}{m_2} & 0 |
||
\end{bmatrix} |
\end{bmatrix} |
||
\begin{bmatrix} |
\begin{bmatrix} |
||
g \\ |
g \\ |
||
L_1 \\ |
|||
L_2 \\ |
|||
F |
|||
\end{bmatrix} |
\end{bmatrix} |
||
Latest revision as of 16:25, 13 December 2009
Setup State Space Equation
Problem Statement
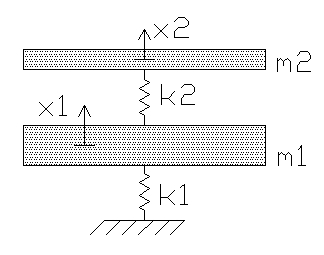
Find an input function such that the lower mass, , is stationary in the steady state. Find the equation of motion for the upper mass, .


The use of one spring between the masses is just a simplification of a multi-spring system, so the possibility of being off-kilter is neglected and just the vertical forces are considered.

Initial Conditions and Values




Force Equations


Sum of the forces in the x direction yields
For



Since


And for


Since

Where is the input force


State Space Equation
The general form of the state equation is

Where denotes a matrix and denotes a vector.


Let , , , and be the state variables, then





