|
|
| Line 39: |
Line 39: |
|
|
|
|
|
== Inverse Laplace Transform == |
|
== Inverse Laplace Transform == |
|
[[Image:mass_spring_displacement_plot.png|thumb|Figure 2. Coupled Spring System Displacement.]] |
|
[[Image:mass_spring_displacement_plot.png|thumb|Figure 2. Coupled Spring System Motion.]] |
|
First, we recognize that |
|
First, we recognize that |
|
|
|
|
Figure 1. Coupled Spring System.
Problem Statement
Derive the system of differential equations describing the straight-line vertical motion of the coupled spring shown in Figure 1. Use Laplace transform to solve the system when  ,
,  , and
, and  ,
,  ,
,  , and
, and  .
.
Solution
At positions  and
and  , the masses
, the masses  and
and  are in equilibrium. Thus, the motion equations for and are,
are in equilibrium. Thus, the motion equations for and are,

- ∴


- ∴

where  and
and  represent the Newton's Second Law of Motion and
represent the Newton's Second Law of Motion and  and
and  represent the net forces acting in the masses.
represent the net forces acting in the masses.
Laplace Transform
Applying the Laplace Transform to the motion equations and plugging the values of  ,
,  ,
,  , , ,
, , ,  ,
,  ,
,  , and
, and  for this systems, we obtain,
for this systems, we obtain,
![{\displaystyle {\mathcal {L}}[m_{1}{\ddot {x}}_{1}+k_{1}x_{1}-k_{2}(x_{2}-x_{1})]=m_{1}[s^{2}X_{1}(s)-sx_{1}(0)-{\dot {x}}_{1}(0)]+k_{1}X_{1}(s)-k_{2}(X_{2}(s)-X_{1}(s))=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/392e87c396fb62f5b82104864e0edf76c8a6f5d9)


![{\displaystyle X_{1}(s)={\dfrac {1(s0+(-1)]+1X_{2}(s)}{(1s^{2}+1+1)}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1569d4323a471f35f58c9deed7a415e1d26dfdea)

![{\displaystyle {\mathcal {L}}[m_{2}{\ddot {x}}_{2}+k_{2}(x_{2}-x_{1})+k_{3}x_{2}]=m_{2}[s^{2}X_{2}(s)-sx_{2}(0)-{\dot {x}}_{2}(0)]+k_{2}(X_{2}(s)-X_{1}(s))+k_{3}X_{2}(s)=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/49aeddc8f5081ddc55dd841a7d07ef8aab4d9903)




Finally, solving for  and
and  yields,
yields,


Inverse Laplace Transform
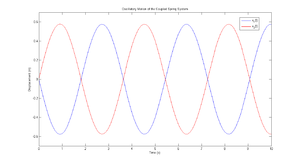
Figure 2. Coupled Spring System Motion.
First, we recognize that

On the other hand, we identify that  , and so
, and so  . Hence, we fix the expression by multiplying and dividing by
. Hence, we fix the expression by multiplying and dividing by  ,
,
![{\displaystyle x_{1}(t)={\mathcal {L}}^{-1}[X_{1}(s)]={\mathcal {L}}^{-1}\left[{\dfrac {-1}{s^{2}+3}}\right]=-{\dfrac {1}{\sqrt {3}}}{\mathcal {L}}^{-1}\left[{\dfrac {\sqrt {3}}{s^{2}+3}}\right]=-{\dfrac {1}{\sqrt {3}}}sin({\sqrt {3}}t)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5a32d68f215f452efdbcce10a11e1b233a8fc230)
![{\displaystyle x_{2}=(t){\mathcal {L}}^{-1}[X_{2}(s)]={\mathcal {L}}^{-1}\left[{\dfrac {1}{s^{2}+3}}\right]={\dfrac {1}{\sqrt {3}}}{\mathcal {L}}^{-1}\left[{\dfrac {\sqrt {3}}{s^{2}+3}}\right]={\dfrac {1}{\sqrt {3}}}sin({\sqrt {3}}t)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/19364b5f445eb5a82d33a1d0b3ae49ec90388a72)
A plot of the system displacement is shown on Figure 2.
Initial-Value & Final-Value Theorem
The initial-value and final-value theorem can be useful the finding the behavior of a functionat small and large times respectively. By definition, the Initial-Value Theorem is,

and the Final-Value Theorem is,

Thus, applying both theorems to our the Laplace Transforms,




Bode Plot
The Bode plot for the Transfer Functions

and

can be easily done using a program like Octave or MATLAB. The code is displayed below. From Figure 3 we may notice that the Amplitude vs. Frequency plot for both functions overlaps. The peak amplitude occurs at about 2 seconds, as well as the phase switching as shown in the Phase vs. Frequency plot.
h1=tf([-1],[1 0 3]);
h2=tf([1],[1 0 3]);
bode(h1,'b',h2,'-.r');
legend('H_1(s)','H_2(s)')
grid on;
Magnitude Frequency Response
Considering the Transfer Functions  and
and  described in the Bode Plot section, we notice that there are no values for the s-variable that make and equal zero.
described in the Bode Plot section, we notice that there are no values for the s-variable that make and equal zero.
Convolution
State Equation Model
References


