|
|
| Line 114: |
Line 114: |
|
From this we can see that:<br> |
|
From this we can see that:<br> |
|
<math>y(t)= |
|
<math>y(t)= |
|
|
\begin{bmatrix} |
|
⚫ |
|
|
⚫ |
|
|
|
\begin{bmatrix} |
|
|
x1 \\ |
|
|
x2 \\ |
|
|
\end{bmatrix}+ |
|
\begin{bmatrix} |
|
\begin{bmatrix} |
|
0 \\ |
|
0 \\ |
|
|
\end{bmatrix}f(t) |
| ⚫ |
|
|
|
⚫ |
|
| ⚫ |
\end{bmatrix} \mathbf{x}+[0]f(t) |
|
|
|
So we can see that:<br> |
| ⚫ |
|
|
|
|
</math>C= |
|
|
\begin{bmatrix} |
|
|
0 \ 1 \\ |
|
|
\end{bmatrix}</math><br> |
|
|
and<br> |
|
|
<math>D=[0]</math>.<br> |
|
|
|
|
|
|
|
|
|
|
|
I'll be adding more on how to use state space form to solve these equations as I have time. |
|
I'll be adding more on how to use state space form to solve these equations as I have time. |
Revision as of 15:19, 7 March 2011
In my Signals and Systems II class at University of Idaho, we are learning about the state space form of representing a solution to a LTI differential equation. I'll add more here soon.
Consider the differential equation

or

The state of this equation can be described using what is called state space form. State space form gives the blah blah more here.
let 
let 
so 
We can now re-write the equation above to be:

so

and from the definition above

We can take this and put it into matrix form:

Or, more generally,

Where the bold faced x is a matrix such that:

This is called the state space representation of the differential equation. This can be quite useful because the entire description of the differential equation is available in the matrix, and is easily manipulated using linear algebra.
-Example-
For the circuit below, find a set of state variable equations (there are several ways to do this, I will choose the one I feel is most intuitive.)
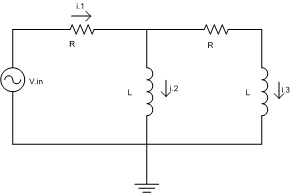
Start by using loop (also known as mesh or KVL) analysis.
Loop 1:

Loop 2:

Lets let:
 and
and

So,  . Substituting into the equations above, we get:
. Substituting into the equations above, we get:
 and
and

Where  is the derivative of
is the derivative of  .
.
Solving these equations for and  We find:
We find:

and

Now we can write these equations in stat space matrix form:

Where

and

So then, since  is our forcing function
is our forcing function  :
:
 ,
,
We now have our differential equations in state space form.
Now, these equations aren't much use by themselves, we need to use them to find the output of the system y(t). y(t) in state space form is expressed as follows:

Lets suppose that y(t) is the voltage across the inductor that has i3 passing through it. That means that:

From this we can see that:

So we can see that:
</math>C=
\begin{bmatrix}
0 \ 1 \\
\end{bmatrix}</math>
and
![{\displaystyle D=[0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a76cb43280c17729e46004e3ea34acce17a29fd4) .
.
I'll be adding more on how to use state space form to solve these equations as I have time.
